PX4 문서 개요
개시하다
원래 PX4는

https://docs.px4.io/master/assets/img/logo_pro_small.e0fa34bd.png
{kind=link}
SITL(software-in-the-loop)라고 하는데 반대로 실제 하드웨어를 사용하여HITL(hardware-in-the-loop)

https://www.dronecode.org/wp-content/uploads/sites/24/2020/08/dronecode_logo_default-2.png
{kind=link}
https://www.dronecode.org/wp-content/uploads/sites/24/2018/02/Dronecode-software-stack.png
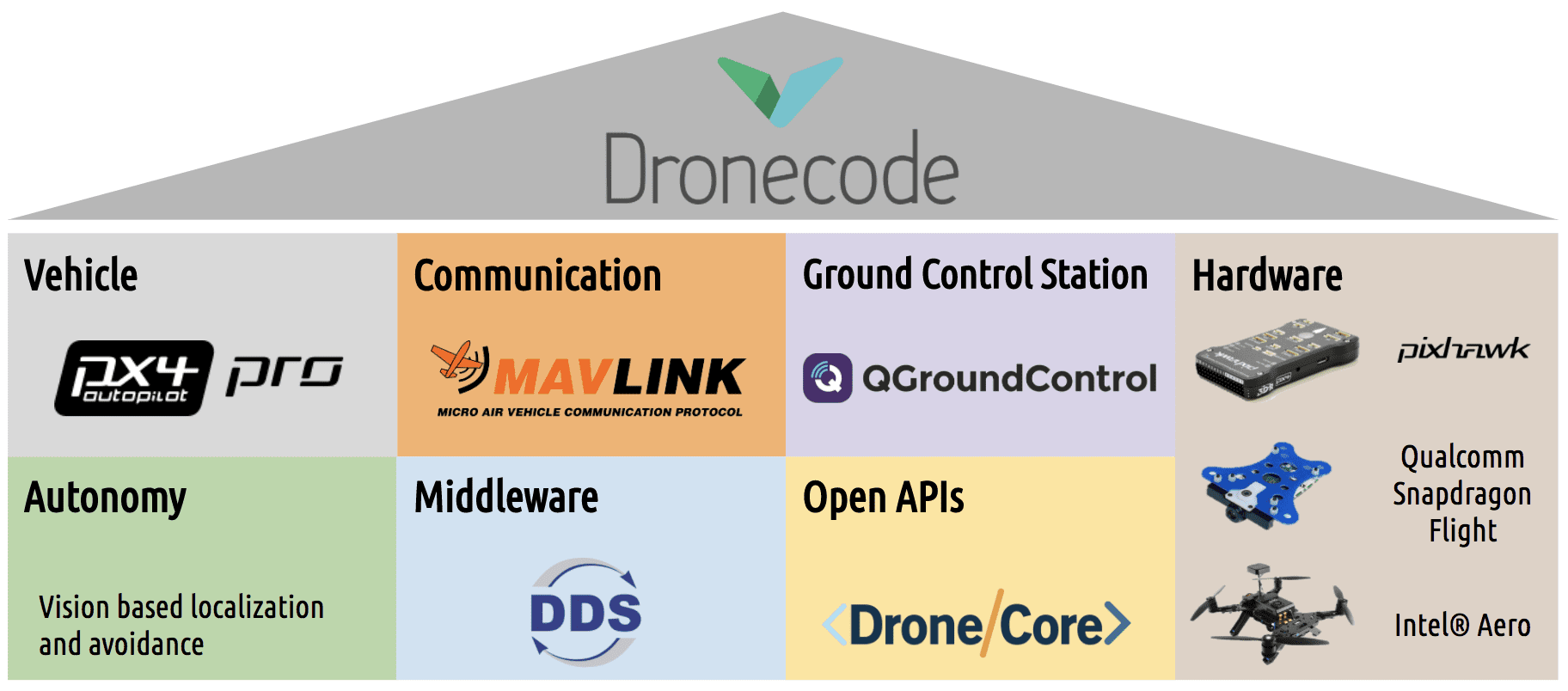{kind=link}
이번에 읽을 문서
디렉토리 및 링크(언제든지 업데이트)
끝맺다
Reference
이 문제에 관하여(PX4 문서 개요), 우리는 이곳에서 더 많은 자료를 발견하고 링크를 클릭하여 보았다 https://qiita.com/asu_mio_310/items/3368cae05e07d775e9c4텍스트를 자유롭게 공유하거나 복사할 수 있습니다.하지만 이 문서의 URL은 참조 URL로 남겨 두십시오.
![]() 우수한 개발자 콘텐츠 발견에 전념
(Collection and Share based on the CC Protocol.)
우수한 개발자 콘텐츠 발견에 전념
(Collection and Share based on the CC Protocol.)
좋은 웹페이지 즐겨찾기
