charuco 교정 보드
15412 단어 C++교정OpenCVopencv_contrib이미지 처리
소개
OpenCV에서 카메라 캘리브레이션을 하는 경우, 타겟으로서 체스보드 이미지 이나 원 그리드 이미지 를 사용하는 경우가 많다고 생각합니다.
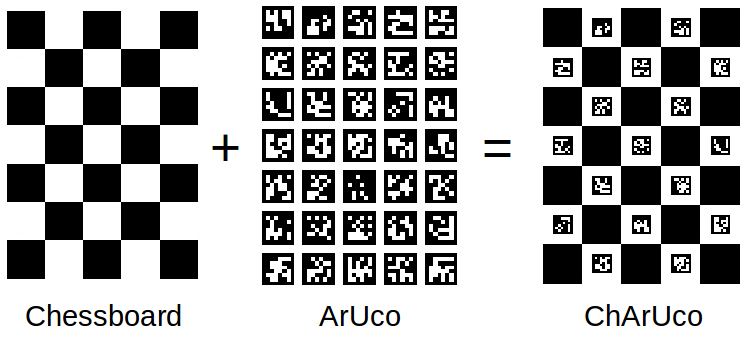
캘리브레이션 조사 중 체스보드 이미지의 하얀 송어 부분에 뭔가 QR 코드 스타일의 패턴이있는 것을 볼 수있었습니다.
조사해 보면, Opencv contrib의 AR 마커 검출등의 모듈인 aruco 모듈안의 기능의 하나, charuco 모듈이라고 하는 것이었으므로, 시험에 사용해 보기로 했습니다.
참고
소스 코드 등은 OpenCV의 레퍼런스를 참고로 하고 있습니다.
htps : // / cs. 오펜 cv. rg / 4.1.2 / df / d4 아 / 쓰리 아 l_ 캬루코_에서 c 치오. HTML
보드 이미지 만들기
우선, 캘리브레이션에 사용하는 보드의 이미지를 작성할 필요가 있습니다만, 그 이미지를 작성하는 기능도 charuco 모듈에 포함되어 있습니다.
다음 코드를 사용하여 교정 이미지를 만들 수 있습니다.
main.cpp#include <opencv2/opencv.hpp>
#include <opencv2/aruco/charuco.hpp>
int main(int argc, const char * argv[]) {
//マーカ辞書作成 6x6マスのマーカを250種類生成
cv::Ptr<cv::aruco::Dictionary> dictionary = cv::aruco::getPredefinedDictionary(cv::aruco::DICT_6X6_250);
//charucoボード生成 10x7マスのチェスボード、グリッドのサイズ0.04f、グリッド内マーカのサイズ0.02f
cv::Ptr<cv::aruco::CharucoBoard> board = cv::aruco::CharucoBoard::create(10, 7, 0.04f, 0.02f, dictionary);
cv::Mat boardImage;
board->draw(cv::Size(1920, 1080), boardImage, 10, 1);
cv::imwrite("BoardImage.jpg", boardImage);
}
↓와 같은 이미지를 출력할 수 있습니다.

이 이미지를 용지 등에 인쇄하여 캘리브레이션용 촬영을 수행합니다.
이번에는 귀찮았기 때문에 노트북에 모니터에 찍은 상태로 촬영해 보겠습니다.
탐지
카메라는 iPhone XS 카메라를 사용했습니다.
검색 소스 코드는 다음과 같습니다.
main.cpp#include <iostream>
#include <opencv2/opencv.hpp>
#include <opencv2/aruco/charuco.hpp>
int detectCharucoBoard(std::string srcPath, std::string dstPath)
{
cv::Mat image = cv::imread(srcPath);
cv::Mat imageCopy = image.clone();
//マーカ辞書作成 6x6マスのマーカを250種類生成
cv::Ptr<cv::aruco::Dictionary> dictionary = cv::aruco::getPredefinedDictionary(cv::aruco::DICT_6X6_250);
//charucoボード生成 10x7マスのチェスボード、グリッドのサイズ0.04f、グリッド内マーカのサイズ0.02f
cv::Ptr<cv::aruco::CharucoBoard> board = cv::aruco::CharucoBoard::create(10, 7, 0.04f, 0.02f, dictionary);
//マーカー検出時メソッドを指定
cv::Ptr<cv::aruco::DetectorParameters> params = cv::aruco::DetectorParameters::create();
params->cornerRefinementMethod = cv::aruco::CORNER_REFINE_NONE;
//マーカー検出
std::vector<int> markerIds;
std::vector<std::vector<cv::Point2f> > markerCorners;
cv::aruco::detectMarkers(image, board->dictionary, markerCorners, markerIds, params);
if (markerIds.size() > 0) {
//マーカー位置を描画
cv::aruco::drawDetectedMarkers(imageCopy, markerCorners, markerIds);
//マーカーの座標をもとに、チェスボード画像の交点を検出
std::vector<cv::Point2f> charucoCorners;
std::vector<int> charucoIds;
cv::aruco::interpolateCornersCharuco(markerCorners, markerIds, image, board, charucoCorners, charucoIds);
if (charucoIds.size() > 0)
{
//チェスボード交点位置を描画
cv::aruco::drawDetectedCornersCharuco(imageCopy, charucoCorners, charucoIds, cv::Scalar(0, 0, 255));
}
}
cv::imwrite(dstPath, imageCopy);
return 0;
}
int main(int argc, const char * argv[]) {
detectCharucoBoard("./IMG_5410.jpeg", "./IMG_5410_detect.jpg");
detectCharucoBoard("./IMG_5411.jpeg", "./IMG_5411_detect.jpg");
detectCharucoBoard("./IMG_5412.jpeg", "./IMG_5412_detect.jpg");
return 0;
}
이미지를 보자.
이 이미지는 ...

이렇게 됩니다. 마커(파란색 id)도 체스보드 교차점(빨간색 id)도 모두 검출할 수 있는 것 같습니다.

이것만이라면, 별로 보통 체스 보드에서도 좋지 않다? 라는 느낌이 듭니다.
그러나 이미지를 볼 수 있듯이 charuco 모듈에서 감지되는 체스 보드의 교차점에는 각각 별도의 ID 번호가 있습니다. 아마도이 교차점 ID는 교차점에 가장 가까운 마커 ID를 기반으로 할당하는 것 같습니다. 이렇게하면 일반 체스 보드와 약간 다른 촬영을 할 수 있습니다. 그것은...


이 방법으로 전체 보드가 보이지 않더라도 체스 보드 교차점을 감지 할 수 있습니다.
일반 체스보드 교차점 감지 함수 cv::findChessboardCorners를 사용하면 지정된 매스의 체스보드 이미지 전체가 표시되지 않으면 감지할 수 없습니다. 그래서 카메라를 보드에 가까이 하거나 보드를 화각의 가장자리에서 촬영하려고 하면 보드가 화각 밖으로 튀어나와 보드를 검출할 수 없게 되는 경우가 있었습니다. 그 때문에 통상의 체스보드라면 캘리브레이션용의 촬영 자체가 상당히 번거롭거나 어려웠던 경우가 많습니다만, 이것을 사용하면 효율적으로 촬영할 수 있을 것 같고, 체스 보드의 일부라도 좋은 것 , 전체를 찍지 않아도 좋은 것을 이용해 여러가지 응용할 수 있을 것 같습니다.
덧붙여서 더 업으로 촬영해도 OK였습니다.


요약
charuco의 보드 감지를 시도했습니다.
기존의 체스보드와는 사양이 다른 검출을 할 수 있었으므로, 어떻게 응용할지 생각해 보고 싶습니다.
Reference
이 문제에 관하여(charuco 교정 보드), 우리는 이곳에서 더 많은 자료를 발견하고 링크를 클릭하여 보았다
https://qiita.com/noueezy/items/58730f09f6aa6a97faf5
텍스트를 자유롭게 공유하거나 복사할 수 있습니다.하지만 이 문서의 URL은 참조 URL로 남겨 두십시오.
 우수한 개발자 콘텐츠 발견에 전념
(Collection and Share based on the CC Protocol.)
우수한 개발자 콘텐츠 발견에 전념
(Collection and Share based on the CC Protocol.)
{kind=link}
{kind=link}
{kind=link}
소스 코드 등은 OpenCV의 레퍼런스를 참고로 하고 있습니다.
htps : // / cs. 오펜 cv. rg / 4.1.2 / df / d4 아 / 쓰리 아 l_ 캬루코_에서 c 치오. HTML
보드 이미지 만들기
우선, 캘리브레이션에 사용하는 보드의 이미지를 작성할 필요가 있습니다만, 그 이미지를 작성하는 기능도 charuco 모듈에 포함되어 있습니다.
다음 코드를 사용하여 교정 이미지를 만들 수 있습니다.
main.cpp#include <opencv2/opencv.hpp>
#include <opencv2/aruco/charuco.hpp>
int main(int argc, const char * argv[]) {
//マーカ辞書作成 6x6マスのマーカを250種類生成
cv::Ptr<cv::aruco::Dictionary> dictionary = cv::aruco::getPredefinedDictionary(cv::aruco::DICT_6X6_250);
//charucoボード生成 10x7マスのチェスボード、グリッドのサイズ0.04f、グリッド内マーカのサイズ0.02f
cv::Ptr<cv::aruco::CharucoBoard> board = cv::aruco::CharucoBoard::create(10, 7, 0.04f, 0.02f, dictionary);
cv::Mat boardImage;
board->draw(cv::Size(1920, 1080), boardImage, 10, 1);
cv::imwrite("BoardImage.jpg", boardImage);
}
↓와 같은 이미지를 출력할 수 있습니다.
이 이미지를 용지 등에 인쇄하여 캘리브레이션용 촬영을 수행합니다.
이번에는 귀찮았기 때문에 노트북에 모니터에 찍은 상태로 촬영해 보겠습니다.
탐지
카메라는 iPhone XS 카메라를 사용했습니다.
검색 소스 코드는 다음과 같습니다.
main.cpp#include <iostream>
#include <opencv2/opencv.hpp>
#include <opencv2/aruco/charuco.hpp>
int detectCharucoBoard(std::string srcPath, std::string dstPath)
{
cv::Mat image = cv::imread(srcPath);
cv::Mat imageCopy = image.clone();
//マーカ辞書作成 6x6マスのマーカを250種類生成
cv::Ptr<cv::aruco::Dictionary> dictionary = cv::aruco::getPredefinedDictionary(cv::aruco::DICT_6X6_250);
//charucoボード生成 10x7マスのチェスボード、グリッドのサイズ0.04f、グリッド内マーカのサイズ0.02f
cv::Ptr<cv::aruco::CharucoBoard> board = cv::aruco::CharucoBoard::create(10, 7, 0.04f, 0.02f, dictionary);
//マーカー検出時メソッドを指定
cv::Ptr<cv::aruco::DetectorParameters> params = cv::aruco::DetectorParameters::create();
params->cornerRefinementMethod = cv::aruco::CORNER_REFINE_NONE;
//マーカー検出
std::vector<int> markerIds;
std::vector<std::vector<cv::Point2f> > markerCorners;
cv::aruco::detectMarkers(image, board->dictionary, markerCorners, markerIds, params);
if (markerIds.size() > 0) {
//マーカー位置を描画
cv::aruco::drawDetectedMarkers(imageCopy, markerCorners, markerIds);
//マーカーの座標をもとに、チェスボード画像の交点を検出
std::vector<cv::Point2f> charucoCorners;
std::vector<int> charucoIds;
cv::aruco::interpolateCornersCharuco(markerCorners, markerIds, image, board, charucoCorners, charucoIds);
if (charucoIds.size() > 0)
{
//チェスボード交点位置を描画
cv::aruco::drawDetectedCornersCharuco(imageCopy, charucoCorners, charucoIds, cv::Scalar(0, 0, 255));
}
}
cv::imwrite(dstPath, imageCopy);
return 0;
}
int main(int argc, const char * argv[]) {
detectCharucoBoard("./IMG_5410.jpeg", "./IMG_5410_detect.jpg");
detectCharucoBoard("./IMG_5411.jpeg", "./IMG_5411_detect.jpg");
detectCharucoBoard("./IMG_5412.jpeg", "./IMG_5412_detect.jpg");
return 0;
}
이미지를 보자.
이 이미지는 ...
이렇게 됩니다. 마커(파란색 id)도 체스보드 교차점(빨간색 id)도 모두 검출할 수 있는 것 같습니다.
이것만이라면, 별로 보통 체스 보드에서도 좋지 않다? 라는 느낌이 듭니다.
그러나 이미지를 볼 수 있듯이 charuco 모듈에서 감지되는 체스 보드의 교차점에는 각각 별도의 ID 번호가 있습니다. 아마도이 교차점 ID는 교차점에 가장 가까운 마커 ID를 기반으로 할당하는 것 같습니다. 이렇게하면 일반 체스 보드와 약간 다른 촬영을 할 수 있습니다. 그것은...
이 방법으로 전체 보드가 보이지 않더라도 체스 보드 교차점을 감지 할 수 있습니다.
일반 체스보드 교차점 감지 함수 cv::findChessboardCorners를 사용하면 지정된 매스의 체스보드 이미지 전체가 표시되지 않으면 감지할 수 없습니다. 그래서 카메라를 보드에 가까이 하거나 보드를 화각의 가장자리에서 촬영하려고 하면 보드가 화각 밖으로 튀어나와 보드를 검출할 수 없게 되는 경우가 있었습니다. 그 때문에 통상의 체스보드라면 캘리브레이션용의 촬영 자체가 상당히 번거롭거나 어려웠던 경우가 많습니다만, 이것을 사용하면 효율적으로 촬영할 수 있을 것 같고, 체스 보드의 일부라도 좋은 것 , 전체를 찍지 않아도 좋은 것을 이용해 여러가지 응용할 수 있을 것 같습니다.
덧붙여서 더 업으로 촬영해도 OK였습니다.
요약
charuco의 보드 감지를 시도했습니다.
기존의 체스보드와는 사양이 다른 검출을 할 수 있었으므로, 어떻게 응용할지 생각해 보고 싶습니다.
Reference
이 문제에 관하여(charuco 교정 보드), 우리는 이곳에서 더 많은 자료를 발견하고 링크를 클릭하여 보았다
https://qiita.com/noueezy/items/58730f09f6aa6a97faf5
텍스트를 자유롭게 공유하거나 복사할 수 있습니다.하지만 이 문서의 URL은 참조 URL로 남겨 두십시오.
우수한 개발자 콘텐츠 발견에 전념
(Collection and Share based on the CC Protocol.)
#include <opencv2/opencv.hpp>
#include <opencv2/aruco/charuco.hpp>
int main(int argc, const char * argv[]) {
//マーカ辞書作成 6x6マスのマーカを250種類生成
cv::Ptr<cv::aruco::Dictionary> dictionary = cv::aruco::getPredefinedDictionary(cv::aruco::DICT_6X6_250);
//charucoボード生成 10x7マスのチェスボード、グリッドのサイズ0.04f、グリッド内マーカのサイズ0.02f
cv::Ptr<cv::aruco::CharucoBoard> board = cv::aruco::CharucoBoard::create(10, 7, 0.04f, 0.02f, dictionary);
cv::Mat boardImage;
board->draw(cv::Size(1920, 1080), boardImage, 10, 1);
cv::imwrite("BoardImage.jpg", boardImage);
}
카메라는 iPhone XS 카메라를 사용했습니다.
검색 소스 코드는 다음과 같습니다.
main.cpp
#include <iostream>
#include <opencv2/opencv.hpp>
#include <opencv2/aruco/charuco.hpp>
int detectCharucoBoard(std::string srcPath, std::string dstPath)
{
cv::Mat image = cv::imread(srcPath);
cv::Mat imageCopy = image.clone();
//マーカ辞書作成 6x6マスのマーカを250種類生成
cv::Ptr<cv::aruco::Dictionary> dictionary = cv::aruco::getPredefinedDictionary(cv::aruco::DICT_6X6_250);
//charucoボード生成 10x7マスのチェスボード、グリッドのサイズ0.04f、グリッド内マーカのサイズ0.02f
cv::Ptr<cv::aruco::CharucoBoard> board = cv::aruco::CharucoBoard::create(10, 7, 0.04f, 0.02f, dictionary);
//マーカー検出時メソッドを指定
cv::Ptr<cv::aruco::DetectorParameters> params = cv::aruco::DetectorParameters::create();
params->cornerRefinementMethod = cv::aruco::CORNER_REFINE_NONE;
//マーカー検出
std::vector<int> markerIds;
std::vector<std::vector<cv::Point2f> > markerCorners;
cv::aruco::detectMarkers(image, board->dictionary, markerCorners, markerIds, params);
if (markerIds.size() > 0) {
//マーカー位置を描画
cv::aruco::drawDetectedMarkers(imageCopy, markerCorners, markerIds);
//マーカーの座標をもとに、チェスボード画像の交点を検出
std::vector<cv::Point2f> charucoCorners;
std::vector<int> charucoIds;
cv::aruco::interpolateCornersCharuco(markerCorners, markerIds, image, board, charucoCorners, charucoIds);
if (charucoIds.size() > 0)
{
//チェスボード交点位置を描画
cv::aruco::drawDetectedCornersCharuco(imageCopy, charucoCorners, charucoIds, cv::Scalar(0, 0, 255));
}
}
cv::imwrite(dstPath, imageCopy);
return 0;
}
int main(int argc, const char * argv[]) {
detectCharucoBoard("./IMG_5410.jpeg", "./IMG_5410_detect.jpg");
detectCharucoBoard("./IMG_5411.jpeg", "./IMG_5411_detect.jpg");
detectCharucoBoard("./IMG_5412.jpeg", "./IMG_5412_detect.jpg");
return 0;
}
이미지를 보자.
이 이미지는 ...
이렇게 됩니다. 마커(파란색 id)도 체스보드 교차점(빨간색 id)도 모두 검출할 수 있는 것 같습니다.
이것만이라면, 별로 보통 체스 보드에서도 좋지 않다? 라는 느낌이 듭니다.
그러나 이미지를 볼 수 있듯이 charuco 모듈에서 감지되는 체스 보드의 교차점에는 각각 별도의 ID 번호가 있습니다. 아마도이 교차점 ID는 교차점에 가장 가까운 마커 ID를 기반으로 할당하는 것 같습니다. 이렇게하면 일반 체스 보드와 약간 다른 촬영을 할 수 있습니다. 그것은...
이 방법으로 전체 보드가 보이지 않더라도 체스 보드 교차점을 감지 할 수 있습니다.
일반 체스보드 교차점 감지 함수 cv::findChessboardCorners를 사용하면 지정된 매스의 체스보드 이미지 전체가 표시되지 않으면 감지할 수 없습니다. 그래서 카메라를 보드에 가까이 하거나 보드를 화각의 가장자리에서 촬영하려고 하면 보드가 화각 밖으로 튀어나와 보드를 검출할 수 없게 되는 경우가 있었습니다. 그 때문에 통상의 체스보드라면 캘리브레이션용의 촬영 자체가 상당히 번거롭거나 어려웠던 경우가 많습니다만, 이것을 사용하면 효율적으로 촬영할 수 있을 것 같고, 체스 보드의 일부라도 좋은 것 , 전체를 찍지 않아도 좋은 것을 이용해 여러가지 응용할 수 있을 것 같습니다.
덧붙여서 더 업으로 촬영해도 OK였습니다.
요약
charuco의 보드 감지를 시도했습니다.
기존의 체스보드와는 사양이 다른 검출을 할 수 있었으므로, 어떻게 응용할지 생각해 보고 싶습니다.
Reference
이 문제에 관하여(charuco 교정 보드), 우리는 이곳에서 더 많은 자료를 발견하고 링크를 클릭하여 보았다
https://qiita.com/noueezy/items/58730f09f6aa6a97faf5
텍스트를 자유롭게 공유하거나 복사할 수 있습니다.하지만 이 문서의 URL은 참조 URL로 남겨 두십시오.
우수한 개발자 콘텐츠 발견에 전념
(Collection and Share based on the CC Protocol.)
Reference
이 문제에 관하여(charuco 교정 보드), 우리는 이곳에서 더 많은 자료를 발견하고 링크를 클릭하여 보았다 https://qiita.com/noueezy/items/58730f09f6aa6a97faf5텍스트를 자유롭게 공유하거나 복사할 수 있습니다.하지만 이 문서의 URL은 참조 URL로 남겨 두십시오.
![]() 우수한 개발자 콘텐츠 발견에 전념
(Collection and Share based on the CC Protocol.)
우수한 개발자 콘텐츠 발견에 전념
(Collection and Share based on the CC Protocol.)
좋은 웹페이지 즐겨찾기
